![]()
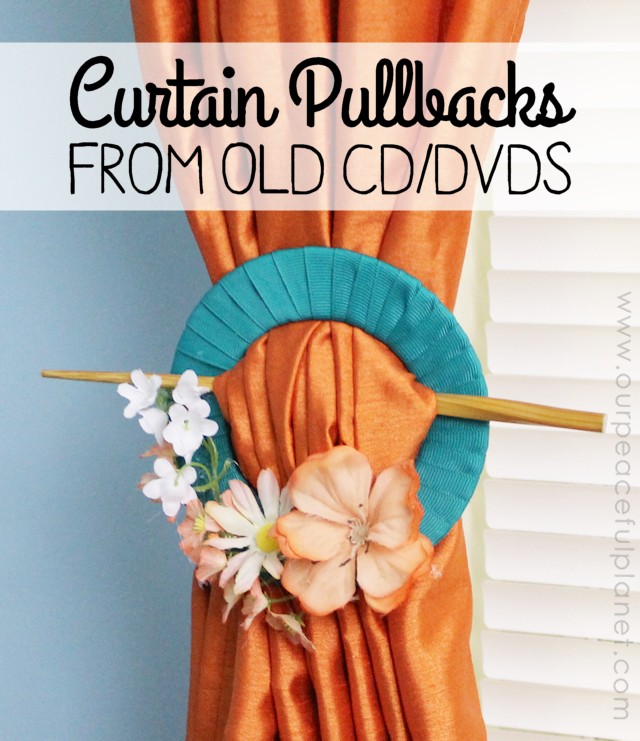
Want a super creative way to hold back your curtains? Well, here it is! It’s an upcycle project that uses an old CD and a chopstick (or a dowel.) Decorate them with some ribbon, artificial flowers and a glue gun and you can make them match any color scheme you like.
Note: These work best for thinner curtains or sheers. I found that the CD’s will bow and possibly break if you try to jam too much material in them though some CD’s are stronger than others.
![]()
Supplies Needed
- CD or DVD (used or new)
- Chop sticks
- Ribbon
- Artificial flowers
- Hot Glue Gun
![]()
Visual Tutorial
Trace a circle in the center of the CD. The size does not have to be exact. I used a regular size vegetable can for tracing.


![]() Using a sharp utility knife cut out the circle. This required going over and over the lines as the CD is fairly thick. It does NOT have to be a smooth even cut.
Using a sharp utility knife cut out the circle. This required going over and over the lines as the CD is fairly thick. It does NOT have to be a smooth even cut.

![]()
![]() Pop out the center part that you cut with the knife.
Pop out the center part that you cut with the knife.

![]()
Toss the small piece.

![]() Wrap your CD circle with ribbon overlapping slightly. Glue down on each end.
Wrap your CD circle with ribbon overlapping slightly. Glue down on each end.

![]()

![]() Glue on flowers of choice. Use a chopstick to attach to curtain. A thin dowel painted would also work.
Glue on flowers of choice. Use a chopstick to attach to curtain. A thin dowel painted would also work.






26 responses
Thank you for sharing! I love this…very bright idea!
Amazing idea.. Thanks for sharing…. Now I know what to do with lots of cds that I got at home… Loved it!
Jo
So glad you found it helpful Jo. Thanks for visiting!
Lovely idea. May I also suggest using brightly coloured button for decoration.
[…] I absolutely adore the way Our Peaceful Planet used CDs to make curtain pull-backs! This is simply genius and has a beautiful, polished […]
So nice and easy to do. I surely can share this idea with my younger sisters. Thanks for posting.
Your very welcome Christia!
What a lovely idea!!! I have tons of old cds!!!
Such a great idea! Found your blog on the “Home Stories A to Z” link up party. Thanks for posting!
Your welcome Bethany. Thanks so much for visiting!
Oh now, this is really creative and cool! I don’t have curtains right now to tie back but if I did I would definitely be using this!
Thanks Nicole. Glad you found it useful!
What a GREAT idea. I’m thinking you could use rope/twine adding shells of drift wod for a coastal look
Thanks Stephanie! You sure could. You could make just about any theme you wish!
Hi! Stopping by from Nifty Thrifty Sunday. Super clever and cute! Thanks for sharing!
Thanks for commenting Ashley!
I was just thinking of pulling the curtains back in my bedroom…I am going to give this cute project a try. Thanks for sharing.
Have a wonderful week, Nancy.
Thank Marigene! Have a wonderful one yourself!
What a clever idea! I need a couple of pul backs and i have lots of CDs around the house
So glad you found it useful! Thanks for stopping by!
Great way to recycle. I love how they turned out too. Very cute. Thanks for sharing at #HomeMattersParty
Thanks Angela! Ü
Those came out so beautiful. I also have soooo many cds that nobody uses anymore, time to put a few to good use!
Thanks Danielle. Thank you so much for posting a comment. Ü Good luck!
This is SO create and SO cute! I have a ton of old cd/DVDs and now have a new use for them! Thanks for sharing!
Your so welcome Amanda! Thank for you stopping by and commenting. Ü